|
I will join College of AI, Tsinghua University as a Tenure-Track Assistant Professor on 08/01/2026! Our group is looking for new PhD students from around the world for Fall 2027 and always looking for undergraduate and graduate students as interns, and also visiting scholars. Please feel free to contact me for advising, collaborations, and any opportunities! I received my PhD in Electrical Engineering at Harvard SEAS and MIT LIDS in 03/2026. I am currently working on Neuro-Symbolic Foundation Models for Robot and Agent Planning under the guidance of Prof. Chuchu Fan and Prof. Nicholas Roy at MIT and co-advised by Prof. Na Li at Harvard. I am also doing the research in AI for Physics, Mechanics, and Materials, particularly interested in applying Robotics/Foundation Models into AI4Science. I received my bachelor's degree at University of Science and Technology of China (USTC) with the major in Theoretical and Applied Mechanics and minor in Applied Mathematics in 2021. Before coming to the Robotics domain, I did researches on Applied Physics, Solid Mechanics, and AI for Science under the guidance of Prof. Ju Li at MIT, Prof. Joost Vlassak at Harvard, Prof. Ting Zhu at Georgia Tech, and Prof. Hailong Wang at USTC. I received the 40th Guo Moruo Award (highest undergraduate honor in USTC) and Harvard SEAS PhD Fellowship. I also work with Google Research, DeepMind, Microsoft Research, and MIT-IBM Watson AI Lab. Email / CV / Scholar / LinkedIn / Github / HuggingFace🤗 / X / Zhihu / RedNote |

|
|
I will give Talk 'Planning and Problem-Solving with General, Scalable Neuro-Symbolic Models' at MIT ML Tea Talk in Nov. 24 and Harvard CS Colloquium in Dec. 11. I will give Talk 'TUMIX: Multi-Agent Test-Time Scaling with Tool-Use Mixture' at Arize AI in Nov. 18 and Neurips Expo Talk in Dec. 03. 2025/11/04 - Invited Talk at Microsoft Research. 2025/10/16 - Invited Talk at AG2 community. 2025/04/07 - We are calling for papers and reviewers for RSS 2025 Workshop on Robot Planning in the Era of Foundation Models (FM4RoboPlan) held on June 21 in Los Angles. 2025/03/06 - Invited Talk at The University of Texas at Austin. 2025/01/30 - Talk at 30th Annual Sanjoy K. Mitter LIDS Student Conference. 2024/12/12 - Keynote talk at Intuit AI Research. 2024/11/18 - Invited talk at AutoGen community. 2024/11/12 - Oral presentation (Top 3%) of PROMST in EMNLP'2024, Miami. 2024/10/31 - Seminar talk at Tencent AI Lab in Seattle. 2024/05/11 - Invited Talk at Osaka Metropolitan University in Japan. 2024/04/30 - Seminar Talk at MIT LIDS Autonomy Tea Talk. 2024/04/18 - Seminar Talk at Harvard AM+ Graduate Student Seminar. 2024/03/07 - Presented AutoTAMP in AGI Leap Summit 2024, and won the best paper award. 2024/01/29 - AutoTAMP has been invited to give seminar talk in ICRA VLMNM workshop. 2023/11/01 - Seminar Talk at Science In the News (SITN): Is ChatGPT the Brain Robots Have Been Waiting For? [Poster] [Slides] |
|
Robotics: Science and Systems (RSS) 2025 Workshop Lead Organizer/Main Contact Person: Robot Planning in the Era of Foundation Models (FM4RoboPlan) Conference/Journal Paper Reviewer: ICLR, ICML, NeurIPS, CVPR, ACL ARR, ICASSP, RAS, RAL, ICRA, IROS, CASE, CDC, AISTATS, NFM, IJCNN, NEUS Workshop Proposal Reviewer: ICML 2024 Workshop Area Chair: ICML 2024 AI4Science, Neurips 2025 AI4Science Workshop Paper Reviewer: ICLR 2025 Reasoning and Planning, CoRL 2024 LEAP, ICLR 2023 ML4Materials, CVPR 2023 Topological, Algebraic, and Geometric Pattern Recognition with Applications, AAAI 2023 DCAA2023-On-Mobile Real-Time Super-Resolution via Neural Architecture Search |
|
Robot Learning infuses robots with AI-derived intelligence; conversely, AI for Science exploits AI to generate new scientific intelligence. Neuro-Symbolic Foundation Models for PlanningI'm currently interested in integrating Foundation Models with symbolic computing for enhanced reasoning and planning of real and digital robots. |
|
|
Yongchao Chen, Jiefeng Chen, Rui Meng, Ji Yin, Na Li, Chuchu Fan, Chi Wang, Tomas Pfister, Jinsung Yoon, The Fourteenth International Conference on Learning Representations (ICLR'2026), TUMIX lifts Gemini-2.5-pro performance from 21.6 to 34.1 on Humanity Last Exam (HLE) Paper / Twitter post We propose Tool-Use-Mixture (TUMIX), leveraging diverse tool-use strategies to improve reasoning. This work shows how to get better reasoning from LLMs by running a bunch of diverse agents (text-only, code, search, etc.) in parallel and letting them share notes across a few rounds. Instead of brute-forcing more samples, it mixes strategies, stops when confident, and ends up both more accurate and cheaper. |
|
|
Yongchao Chen, Yueying Liu, Junwei Zhou, Yilun Hao, Jingquan Wang, Yang Zhang, Na Li, Chuchu Fan The Fourteenth International Conference on Learning Representations (ICLR'2026), R1-CI-3B/7B/14B have been downloaded over 200K times on HuggingFace since 05/12/2025 HuggingFace🤗(R1-CI-3B/7B/14B) / Code / Dataset🤗 / Paper We introduce R1-Code-Interpreter, a framework that enables LLMs to autonomously use a Code Interpreter for diverse reasoning and planning tasks through multi-turn supervised and reinforcement learning. Using a curriculum that prioritizes high-potential samples, the model achieves significantly improved training efficiency and performance, raising accuracy from 44.1% to 72.4% on benchmark tasks. The resulting model, R1-CI-14B, surpasses GPT-4o without a Code Interpreter and slightly exceeds GPT-4o with one, demonstrating emergent self-verification through code generation. |
|
Yilun Hao, Yongchao Chen, Yang Zhang, Chuchu Fan The Fourteenth International Conference on Learning Representations (ICLR'2026) Project Page / Code / Paper / MIT News This work introduces VLMFP, a dual-VLM framework that enables fully autonomous generation of both PDDL problem and domain files from visual planning tasks, overcoming prior reliance on human-defined domains or continual environment access. By pairing a SimVLM that simulates and verifies action consequences with a GenVLM that iteratively refines PDDL files through comparison, VLMFP achieves strong generalization across unseen instances, appearances, and rules. |
|
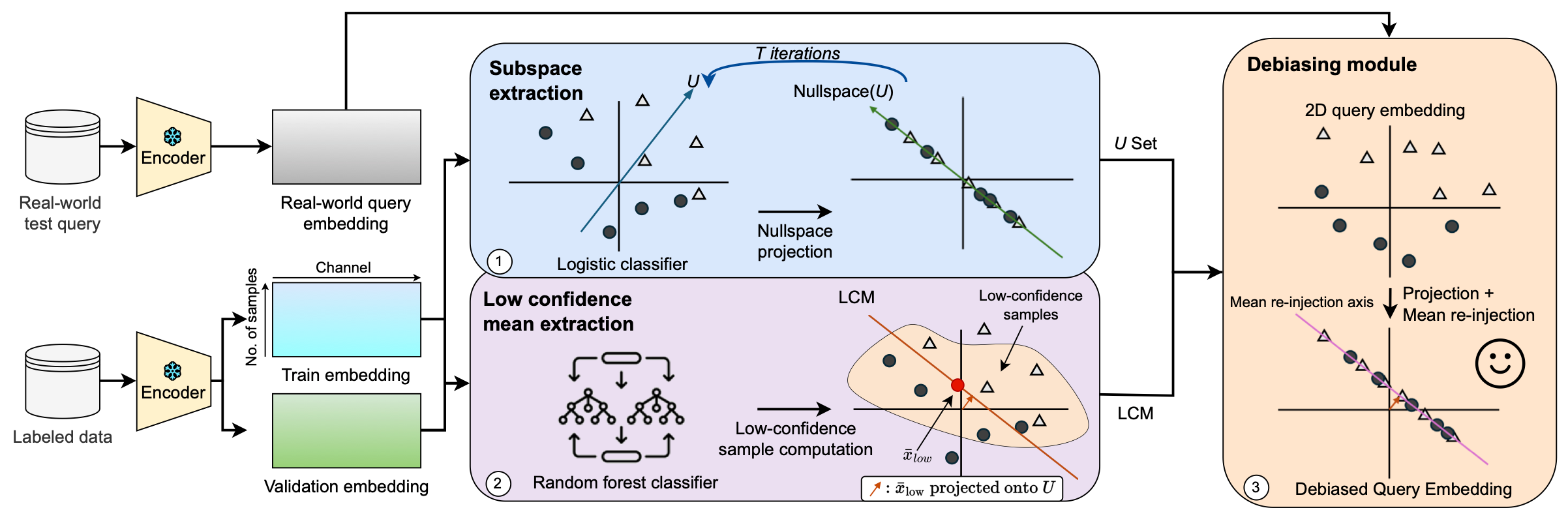
Dachuan Zhao, Weiyue Li, Zhenda Shen, Yushu Qiu, Bowen Xu, Haoyu Chen, Yongchao Chen (Corresponding Author), The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2026 Project Page / Code / Paper This work analyzes demographic bias in Vision-Language Models and shows that existing coordinate-wise debiasing methods fail due to feature entanglement, poor generalization, and incomplete bias removal. We find that bias is distributed across linear subspaces rather than isolated dimensions, and propose Subspace Projection Debiasing (SPD) to remove the full bias subspace while preserving semantic information. |
|
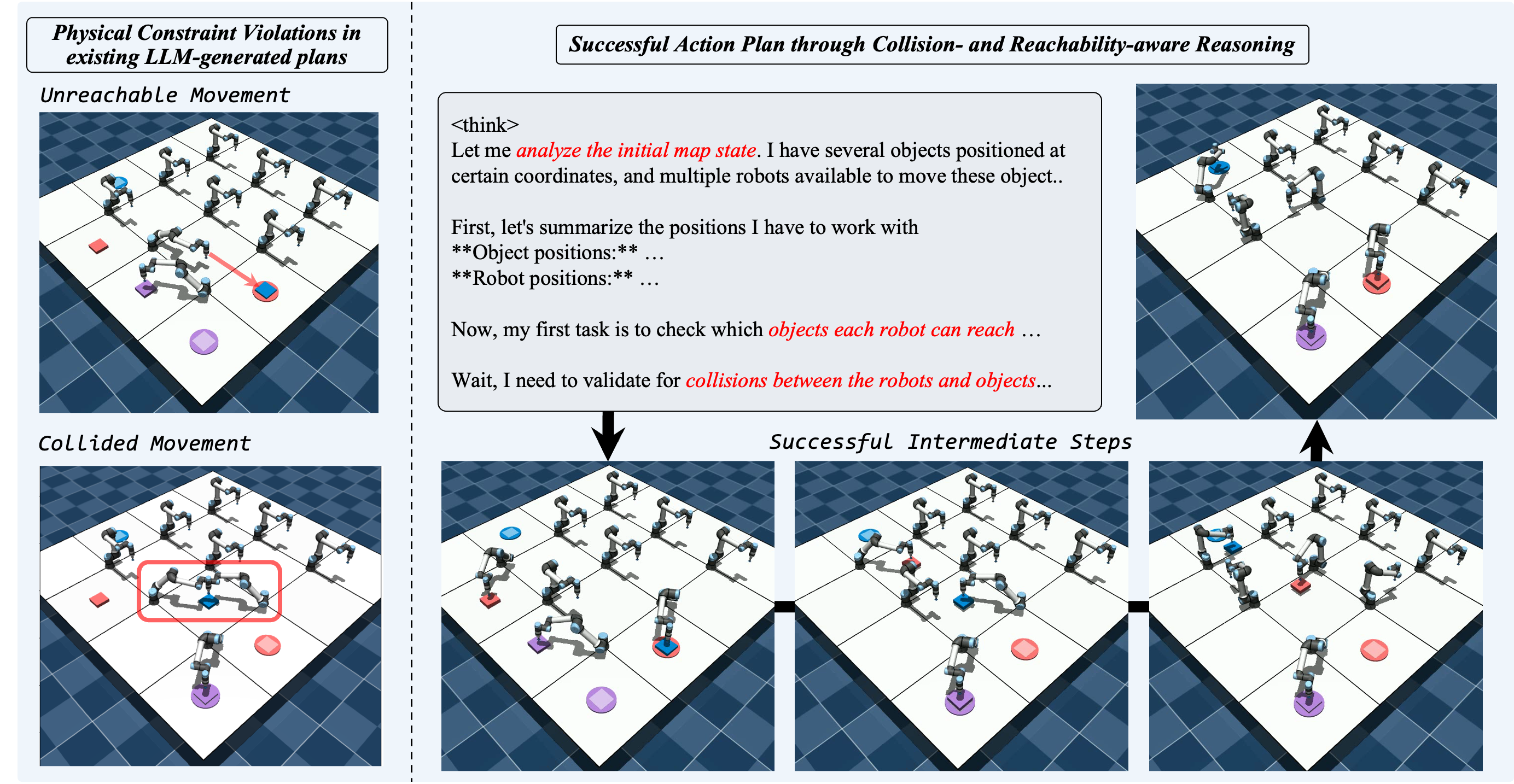
Jiabao Ji, Yongchao Chen, Yang Zhang, Ramana Rao Kompella, Chuchu Fan, Gaowen Liu, Shiyu Chang arXiv HuggingFace🤗 / Code / Paper While LLMs have shown promise in robot control tasks, they often produce physically invalid actions due to a lack of constraint awareness. To address this, we propose a reinforcement learning with verifiable rewards (RLVR) framework that trains LLMs to generate only constraint-compliant action plans, rewarding successful task completion. |
|
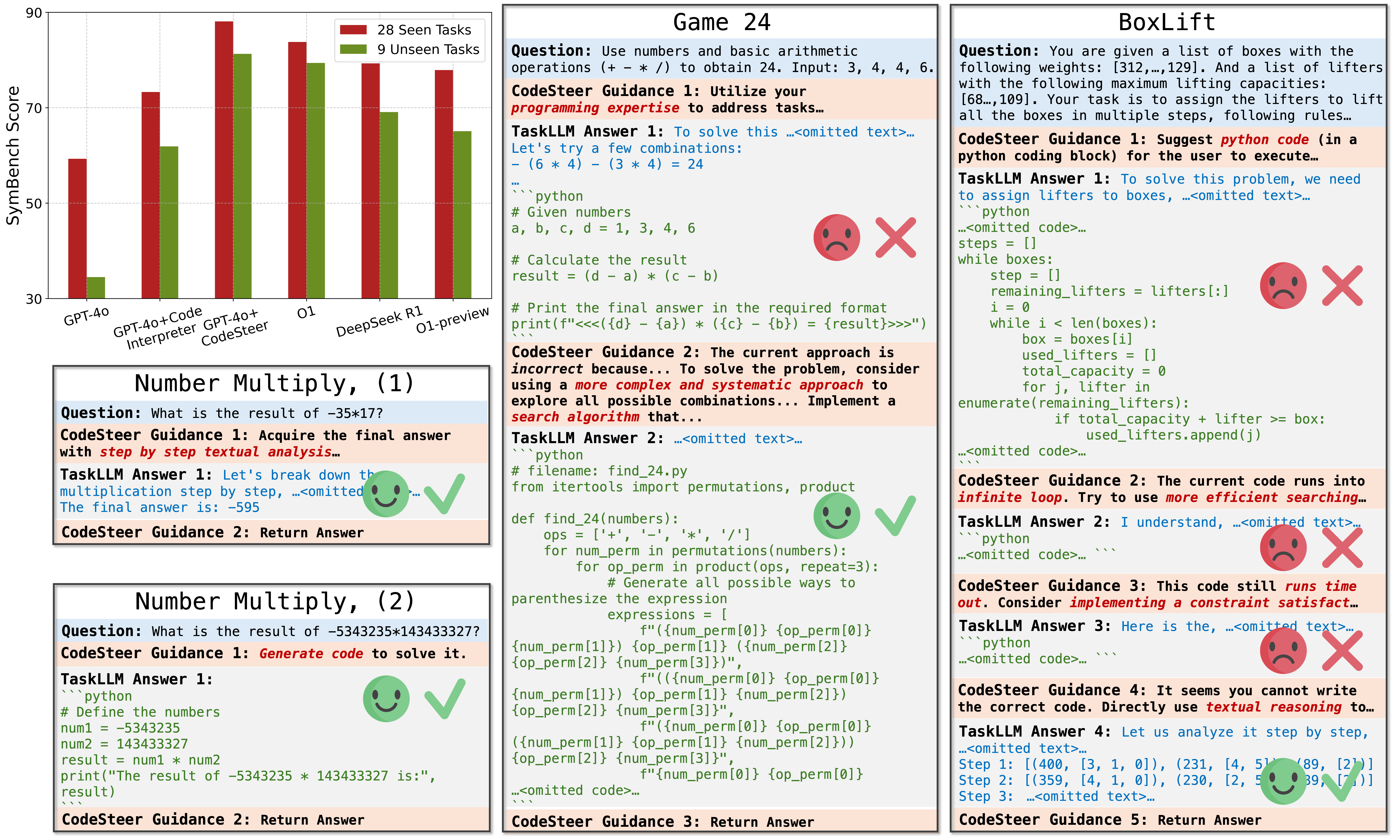
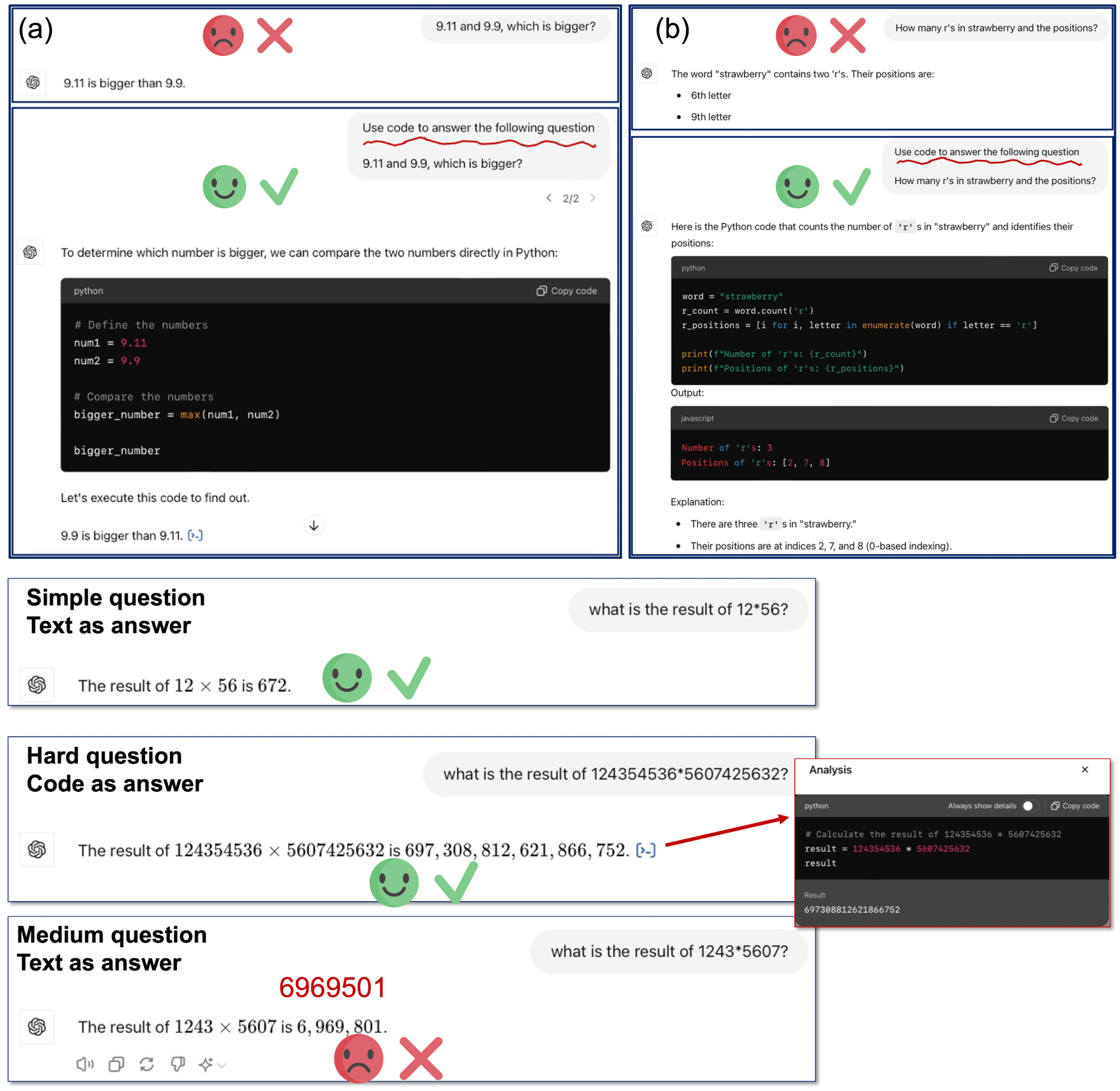
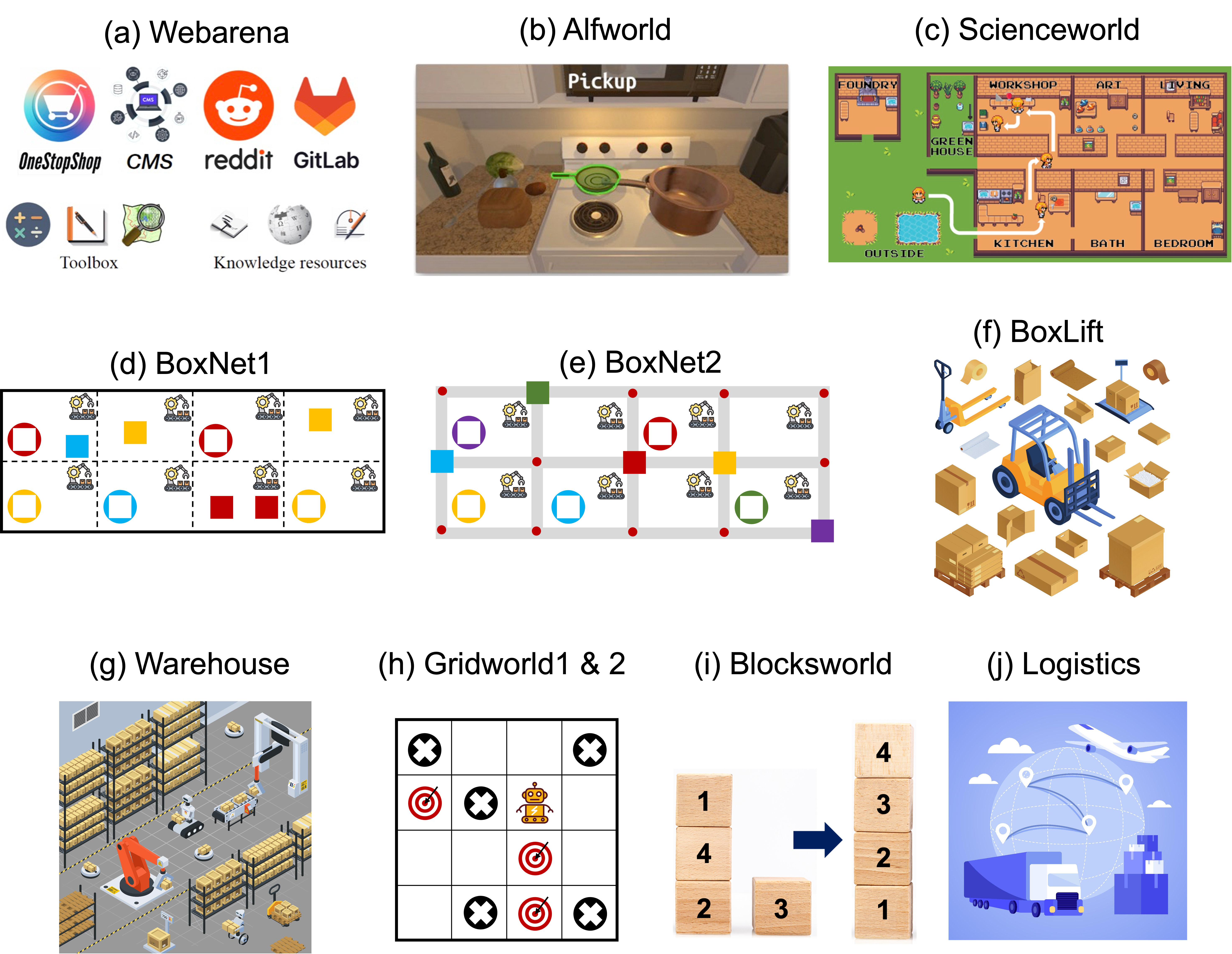
Yongchao Chen, Yilun Hao, Yueying Liu, Yang Zhang, Chuchu Fan Forty-Second International Conference on Machine Learning (ICML'2025), CodeSteerLLM and SymBench have been downloaded over 20K and 30K times, respectively, on HuggingFace since 02/09/2025 HuggingFace🤗 / Code / Dataset / SymBench / Huggingface SymBench / Paper / MIT News / MIT News Spotlight We construct SymBench with 37 tasks related to symbolic computing and train an 8B CodeSteer model with multi-round SFT and DPO to guide GPT-4o in generating more appropriate code logic, thereby better integrating symbolic computation with textual reasoning. Experiments show that GPT-4o + CodeSteer outperforms o1 and R1 across these 37 tasks overall while also reducing costs of tokens and runtime. |
|
|
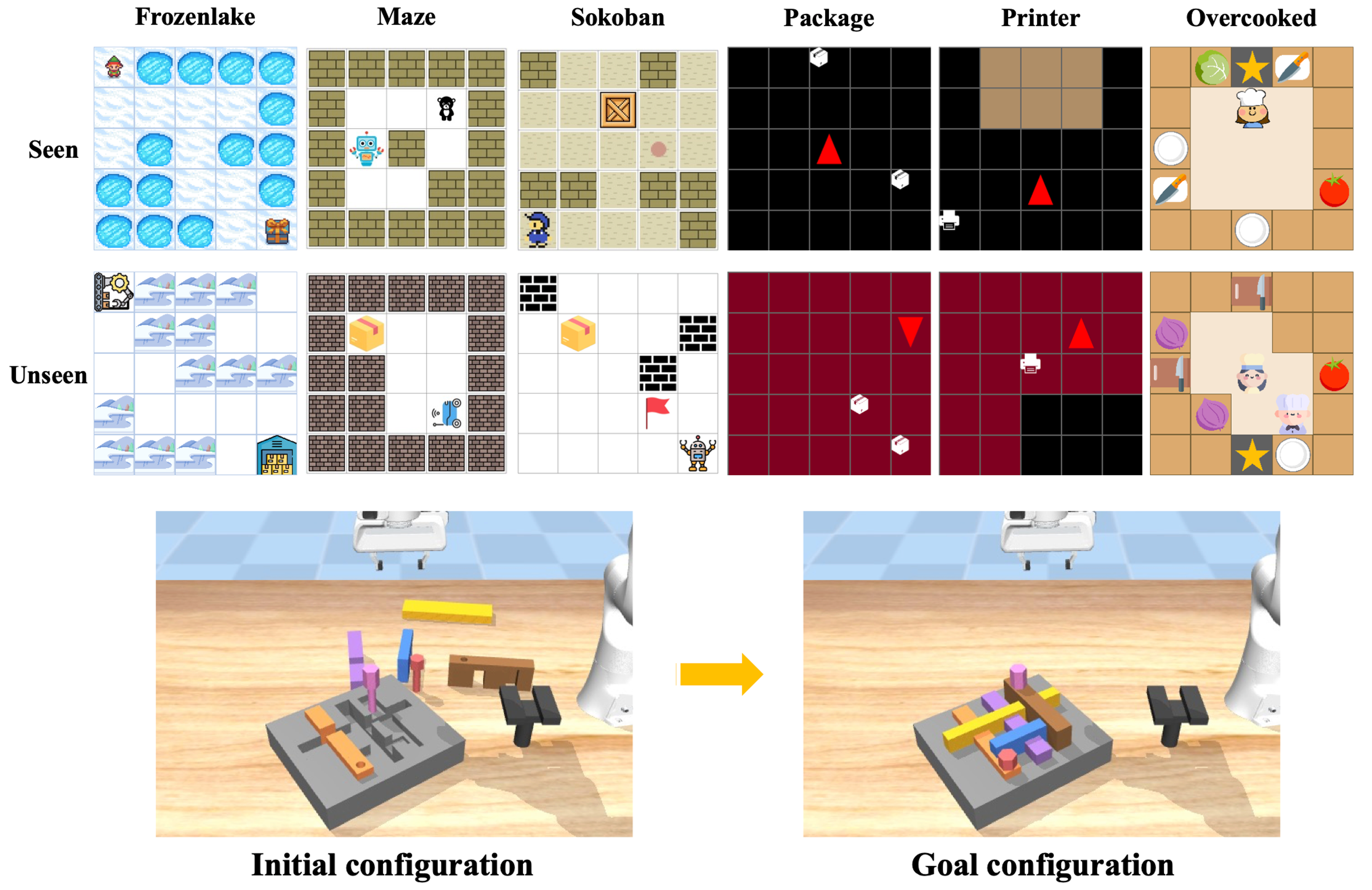
Yongchao Chen, Yilun Hao, Yang Zhang, Chuchu Fan 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS'2025) Project Page / Code / Paper / Video Code-as-Symbolic-Planner: We steer LLMs to generate code as solvers, planners, and checkers for TAMP tasks requiring symbolic computing, across discrete and continuous environments, 2D/3D simulations and real-world settings, single- and multi-robot tasks with diverse requirements. |
|
Yongchao Chen, Harsh Jhamtani, Srinagesh Sharma, Chuchu Fan, Chi Wang The Thirteenth International Conference on Learning Representations (ICLR'2025) Project Page / Code / Paper Our research highlights the limitations of textual reasoning in LLMs for tasks involving math, logic, and optimization, where code generation offers a more scalable solution. Despite advances like OpenAI's GPT Code Interpreter and AutoGen, no optimal method exists to reliably steer LLMs between code and text generation. This study identifies key patterns in how LLMs choose between code and text with various factors and proposes three methods to improve steering. |
|
Yongchao Chen, Jacob Arkin, Yilun Hao, Yang Zhang, Nicholas Roy, Chuchu Fan The 2024 Conference on Empirical Methods on Natural Language Processing (EMNLP'2024 Main, Oral, Top 3%) Project Page / Code / Paper / Initial and Optimized Prompts We introduce an automatic prompt optimization framework for complex, multi-step agent tasks: PROMST. To handle the issues of task complexity, judging long-horizon correctness of individual actions, high prompt exploration cost, and human preference alignment, we propose the integration of human feedback, a learned score prediction model, and the modification of task score functions. |
|
|
Yilun Hao, Yongchao Chen, Yang Zhang, Chuchu Fan 2025 Annual Conference of the Nations of the Americas Chapter of the Association for Computational Linguistics (NAACL'2025 Main, Oral, Top 8%) Project Page / Code / Paper / Video / MIT News Xie et al. (2024) introduced TravelPlanner, revealing that LLMs alone had a low success rate of 0.6%. In response, this work proposes a framework that uses LLMs with satisfiability modulo theory (SMT) solvers to interactively and automatically generate valid travel plans, achieving a 97% success rate on TravelPlanner and over 78% on a newly created international travel dataset. |
|
|
Yongchao Chen, Jacob Arkin, Yang Zhang, Nicholas Roy, Chuchu Fan The 2024 International Conference on Robotics and Automation (ICRA'2024) Project Page / Code / Paper / Video We compare the task success rate and token efficiency of four multi-agent communication frameworks (centralized, decentralized, and two hybrid) and three step history methods (with all history, without history, and with state-action pairs) as applied to four coordination-dependent multi-agent 2D task scenarios for increasing numbers of agents. |
|
|
Yongchao Chen, Jacob Arkin, Charles Dawson, Yang Zhang, Nicholas Roy, Chuchu Fan The 2024 International Conference on Robotics and Automation (ICRA'2024), best paper award in AGI Leap Summit 2024 Project Page / Code / Paper / Video This paper uses LLMs to translate language instructions to formal task specifications that can be solved via a TAMP planner. |
|
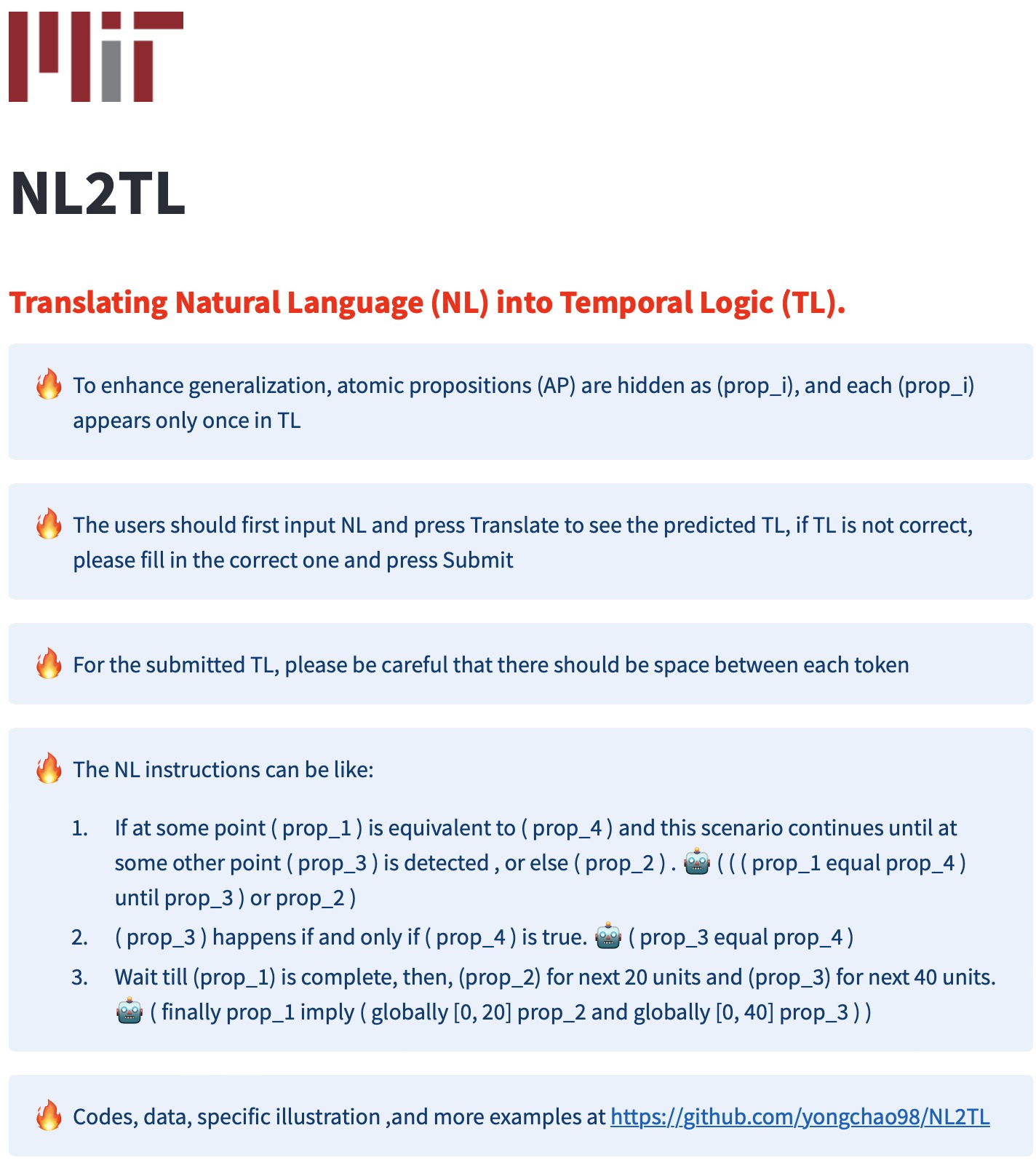
Yongchao Chen, Rujul Gandhi, Yang Zhang, Chuchu Fan The 2023 Conference on Empirical Methods on Natural Language Processing (EMNLP'2023 Main) Project Page / Demo Website / Code / Paper We propose a framework to achieve accurate and generalizable NL-to-TL transformation with the assistance of LLM, from aspects of both data generation and model training. |
Fundamental Science and AI for ScienceI also did much work on fundamental physical sciences and AI for science. Integrating robotics and Foundation Models to help explore new science should be the general trend. |
|
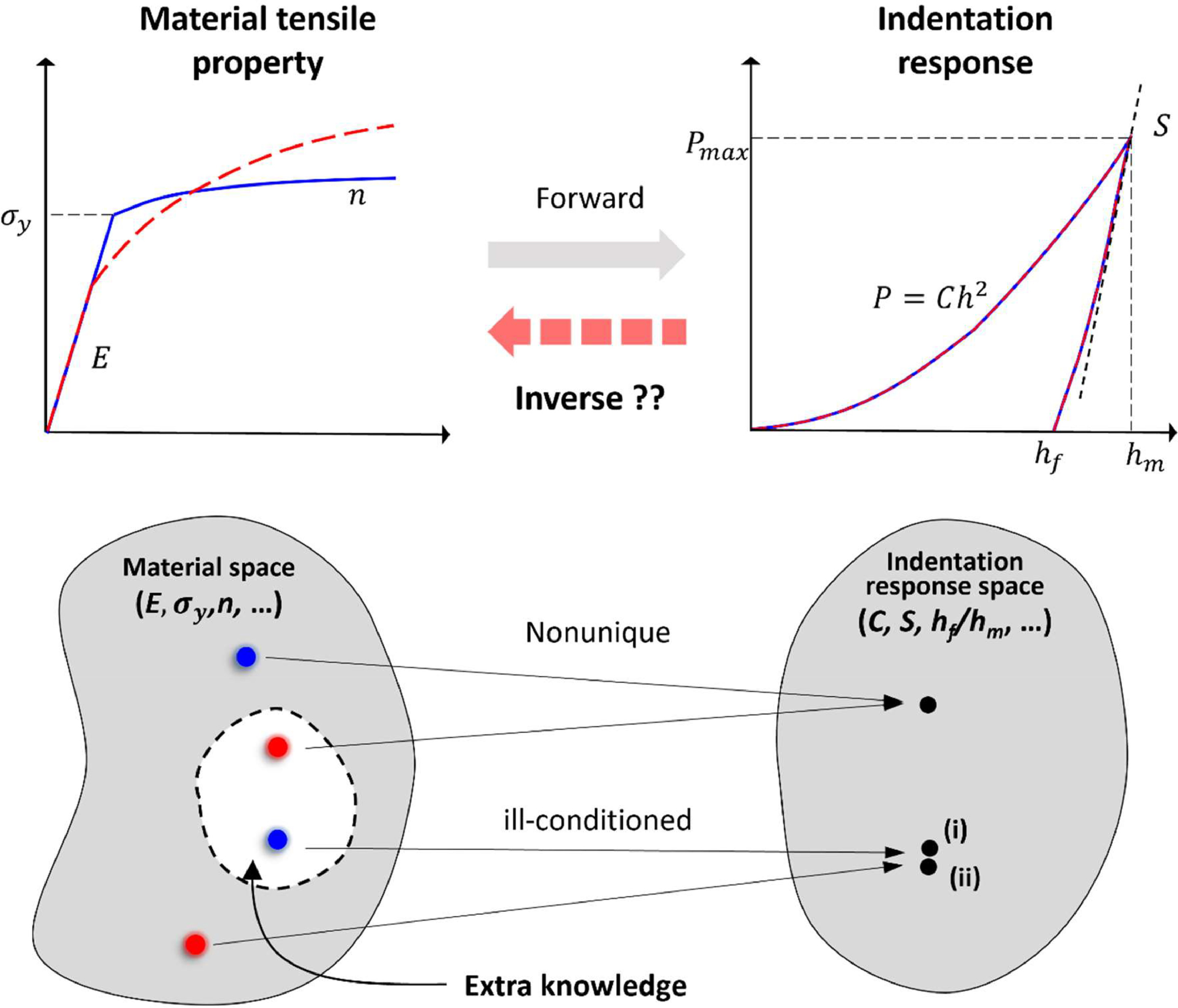
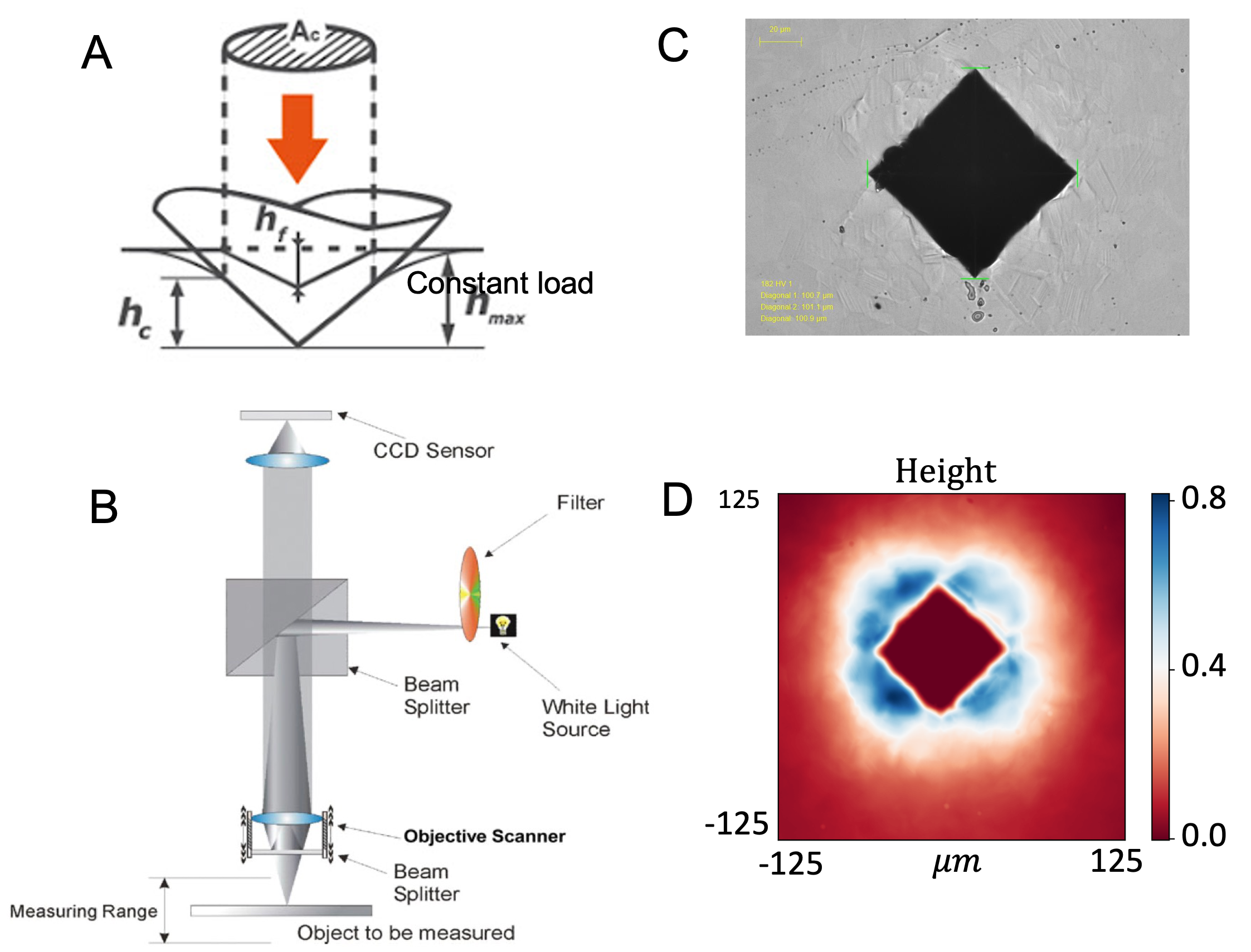
Quan Jiao, Yongchao Chen, Jong-hyoung Kim, Chang-Fu Han, Chia-Hua Chang, Joost J Vlassak* Journal of the Mechanics and Physics of Solids (Acceptance Rate = 24%, Impact Factor = 5.58), 2024 Paper We applied machine learning and optimization methods to explore the forward and inverse problems of indentation. |
|
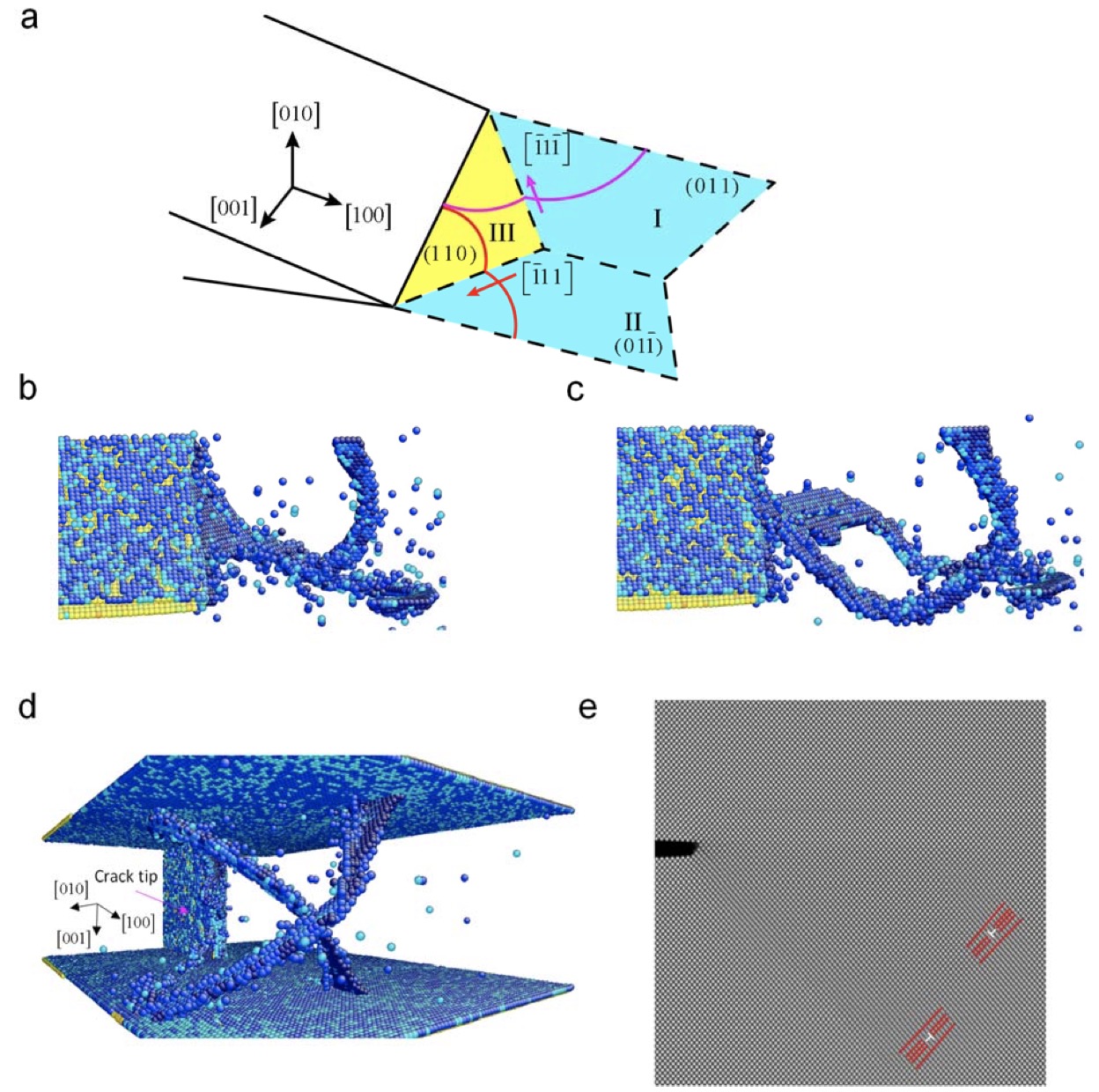
Yan Lu1, Yongchao Chen1 (equal contribution), Yongpan Zeng, Yin Zhang, Deli Kong, Xueqiao Li, Ting Zhu*, Xiaoyan Li*, Shengcheng Mao, Ze Zhang, Lihua Wang*, Xiaodong Han* Nature Communications (Acceptance Rate = 7.7%, Impact Factor = 17.69), 2023 Paper We revealed nanoscale ductile fracture and associated atomistic mechanisms in a body-centered cubic refractory metal. |
|
|
Di Wu, Raymond Zhang, Enrico M Zucchelli, Yongchao Chen, Richard Linares Scientific Reports (Acceptance Rate = 35%, Impact Factor = 3.8), 2025 Paper We construct a benchmark APBench on evaluating Large Language Model Performance in Fundamental Astrodynamics Problems for Space Engineering. |
|
Yongchao Chen* NeurIPS 2023 Workshop on Adaptive Experimental Design and Active Learning in the Real World Paper We apply active learning and multi-fidelity neural networks to explore the inverse problems, mitigate the sim-to-real gap, and automate the material discovery process. |
|
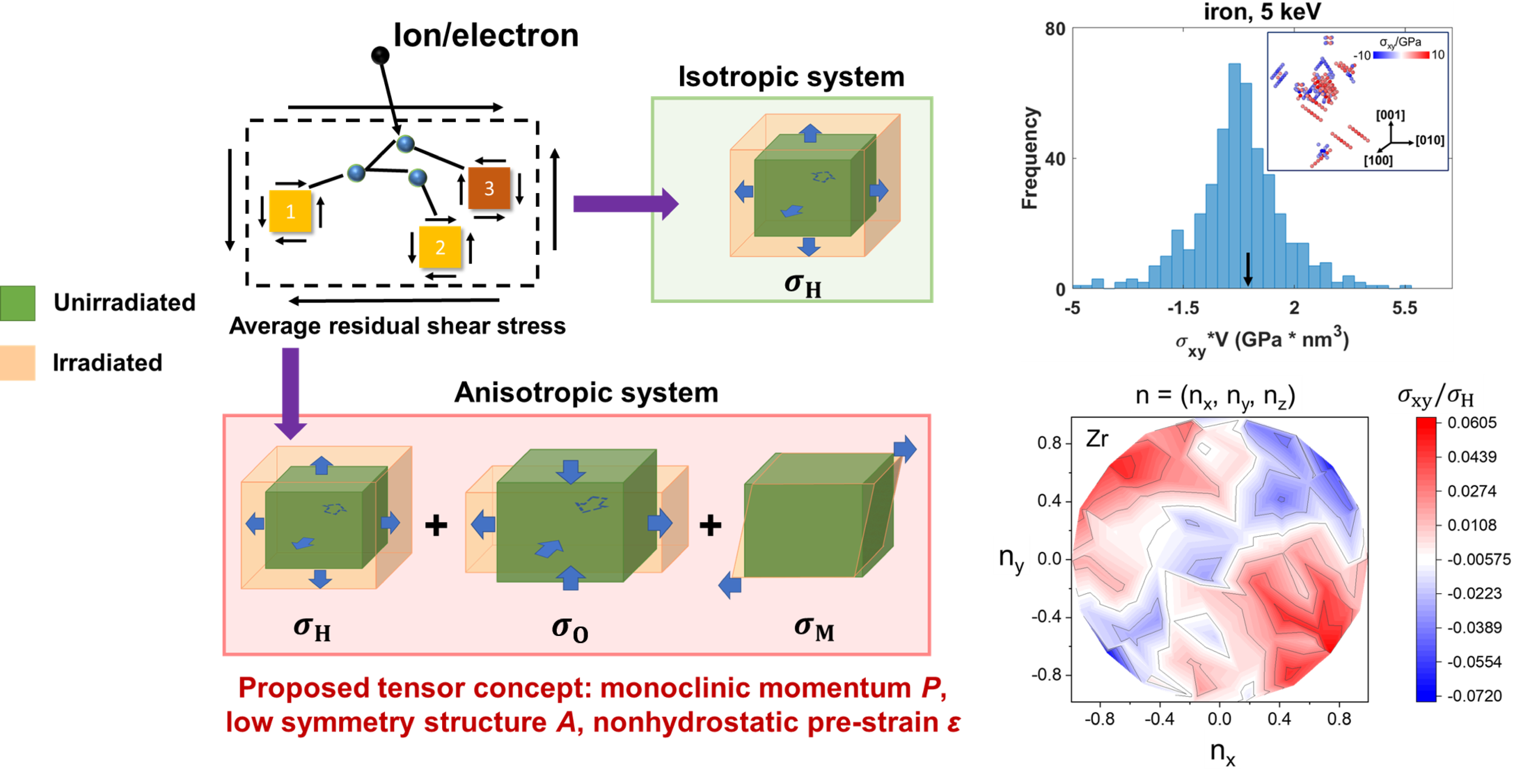
Yongchao Chen, Qingjie Li, Alexander D. O'Brien, Yang Yang, Qi He, David A. Bloore, Joost J. Vlassak*, Ju Li* Extreme Mechanics Letters (Acceptance Rate = 30%, Impact Factor = 4.728), 2023 Paper We revealed the coupling effects of incident direction of PKA and structures of materials on average residual shear stress. |
|
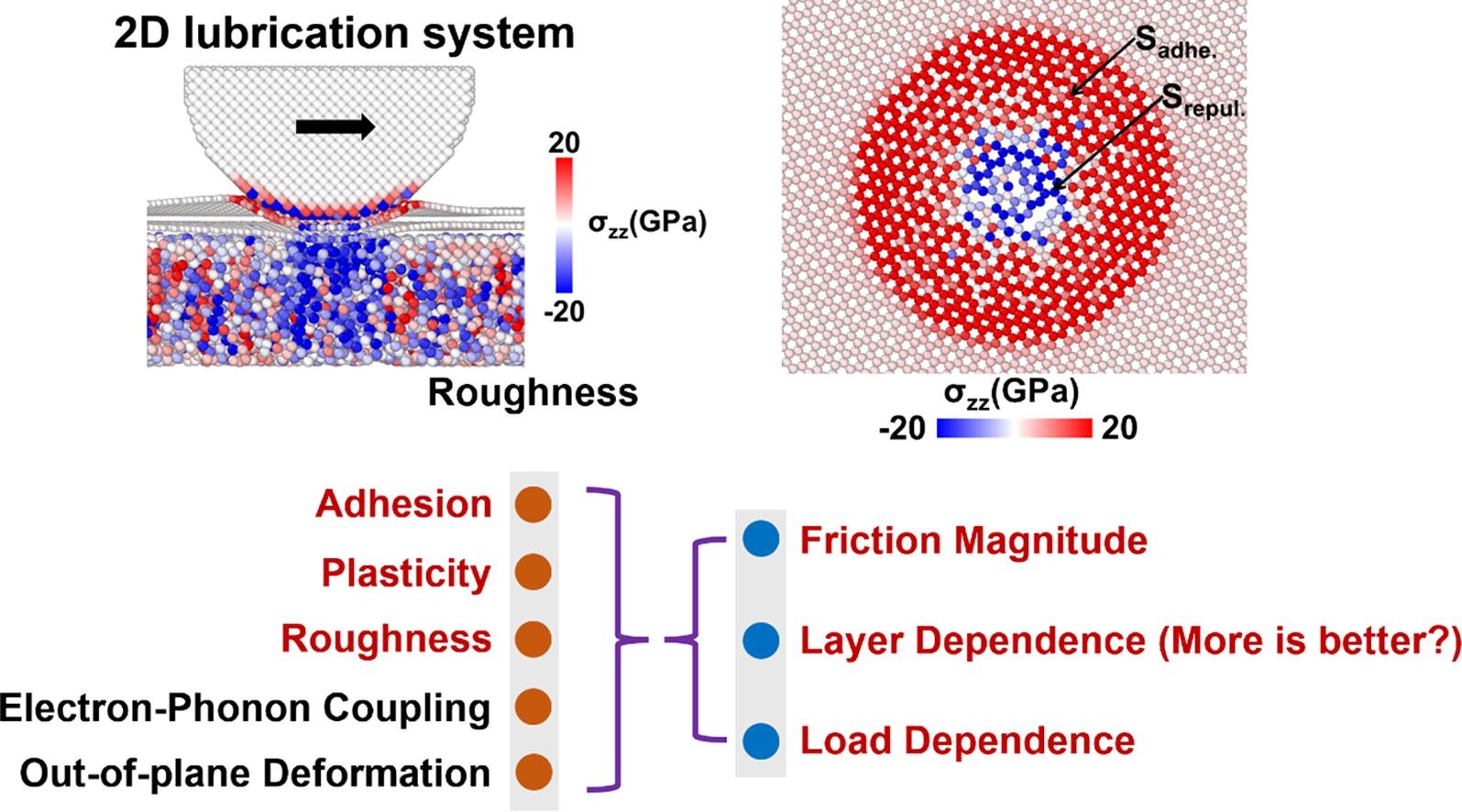
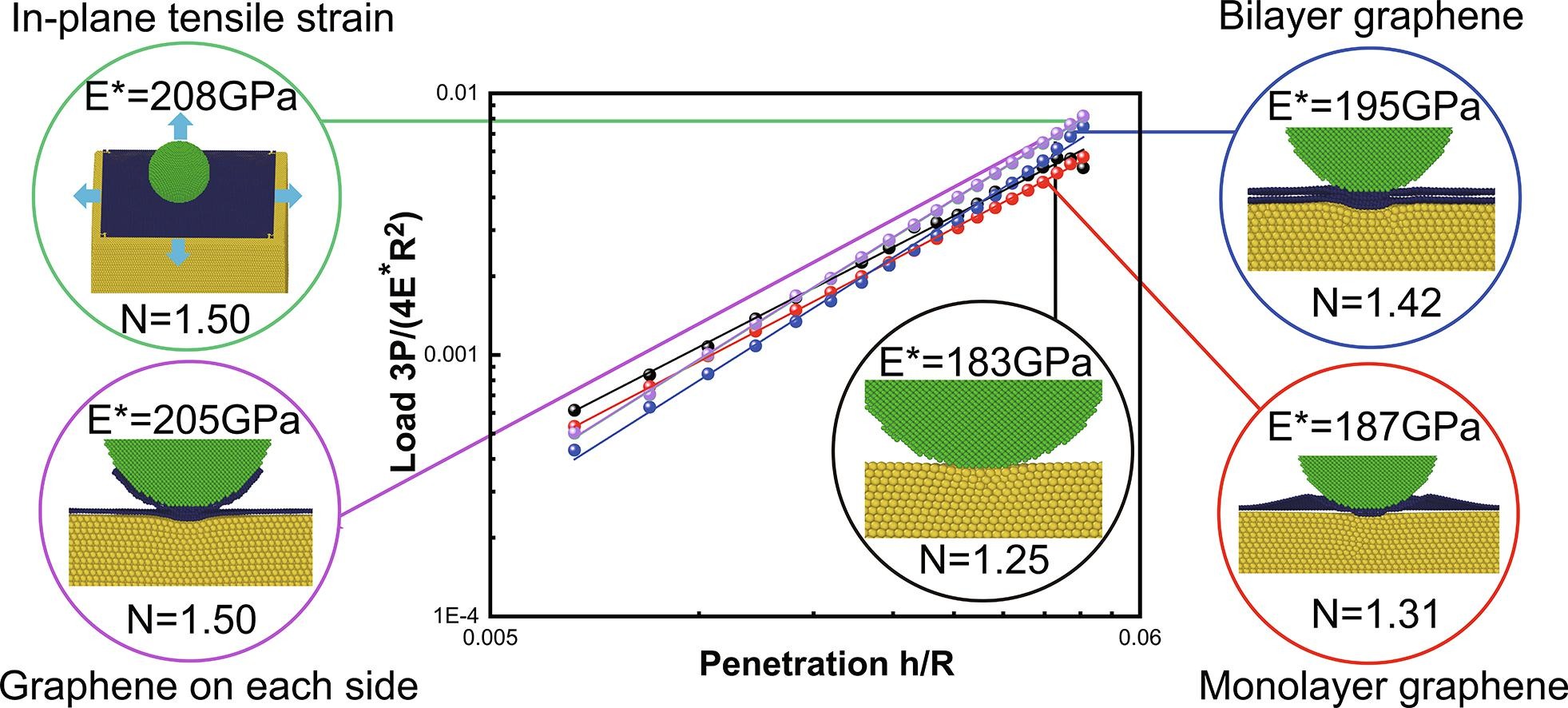
Yongchao Chen, Zhizi Guan, Jingnan Liu, Wei Yang, Hailong Wang* Applied Surface Science (Acceptance Rate = 18%, Impact Factor = 7.392), 2022 Paper We revealed the anomalous layer-dependent frictional behavior, which originates from the interplay among interfacial adhesion, wrinkle of topmost graphene, contact roughness, and plastic deformation of substrates. |
|
Yongchao Chen, Zhizi Guan, Wei Yang, Yongtao Yao, Hailong Wang* Computational Materials Science (Acceptance Rate = 19%, Impact Factor = 3.572), 2021 Paper The influence of the adhesion between the bare substrate and indenter tip can be significantly reduced by decreasing the adhesion strength and adhesion range between the atoms on the substrate and indenter, or by enhancing the substrate stiffness. |
|
Sports: Soccer (I attended Ivy Cup with Harvard twice, though both failed in the group stage…Sad), Basketball, Swimming, Table Tennis, Badminton, Snooker, 5K Marathon. Board Game: Avalon, Texas Hold'em, Werewolf, Secret Hitler, Citadel, UNO, Settlers of Catan. Chess: Chess, Chinese Chess (I won the primary school Chinese chess championship and placed sixth in the city competition.), Go. History: I like studying all kinds of history. Singing: I cannot sing professionally but with much interest to country music, such as ‘Take Me Home, Country Road’ by John Denver and ‘The Girl from The South’ by Lei Zhao. |